[2014] 드론(Drone) - 5 : 거치대 제작 & 수평유지 센서 개발
요세 정말 많이 바쁘네요.
잠도 못자고... (그렇지만 운동은 꼬박꼬박하고 ..)
여튼 이번주는 5주차라고 볼 수 있겠네요!?
이번주 중요한 내용은 꼭 PID값을 위해 거치대를 준비하시기 바랍니다.
(물론 기본값으로 잘 날 수 있지만 저희같은 경우는 모터진동과 프레임 진동을 다 잡아도 힘들었거든요. 비행자체가)
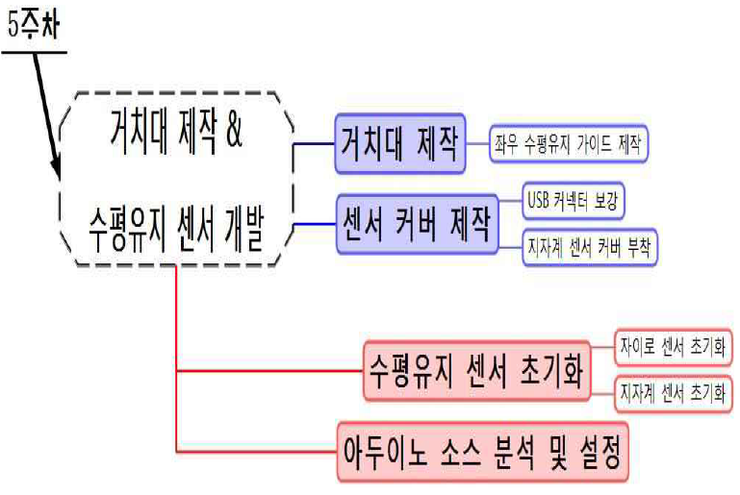
그럼 5주차 작업내용을 마인드맵으로 보시죠!
[마인드맵]
HardWare Part
1. 거치대가 필요한 이유
자이로 센서가 제대로 작동하고 기체가 스스로 평형을 회복하고 유지 할 수 있도록 하는 테스트를 하기 위해서 거치대가 필요하다.
2. 기존에 있는 거치대

기존에 다른 사람들이 쓰던 거치대는 좌우 수평유지 테스트와 x,y축 테스트를 따로 해서
거치대를 만들거나 제작하는데 비용이 많이 발생하고 효율성이 떨어진다.
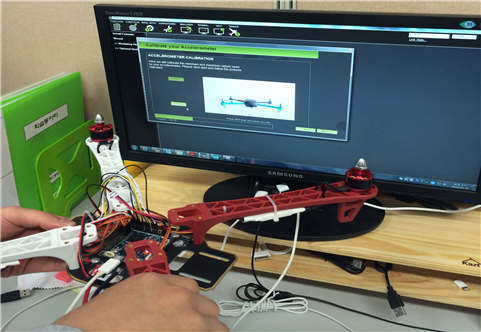
3. 거치대 제작
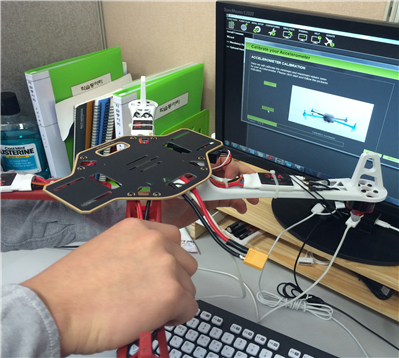
위와 같은 문제점을 해결하기 위해서 두 가지 기능을 해결하기 위해 거치대 하나를 만들어 두 가지 기능을 할 수 있게 하기 위해 고려 해 보던 중 카메라 삼각대를 활용하면 하나로 쉽게 할 수 있다고 생각하여 카메라 삼각대로 거치대를 만들기로 하였다.
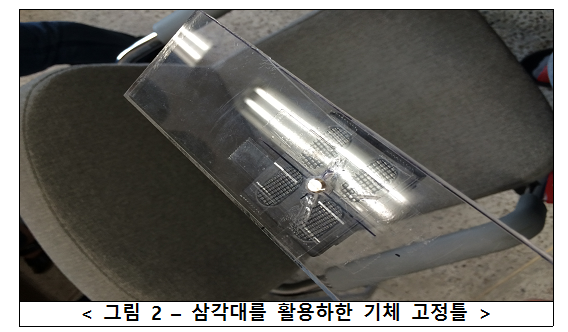
카메라에 체결하는 삼각대와 고정되는 플레이트를 기체에 장착할 수 있도록 틀을 개조하였습니다.
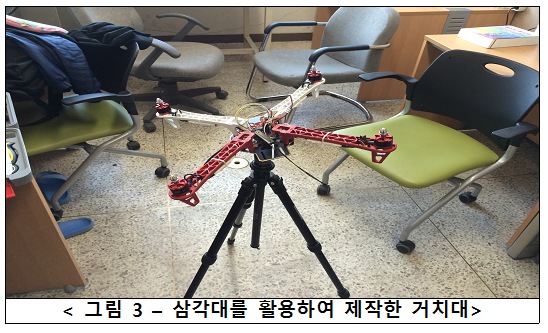
완성된 작품입니다. x,y 축 뿐만 아니라 전체 방향으로도 테스트를 할 수 있는 거치대를 만들었습니다. 기존의 거치대들과는 다르게 이거 하나로도 많은 테스트를 할 수 있습니다.
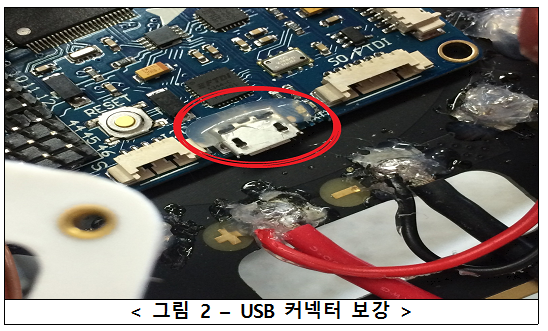
4. USB 커넥터 보강
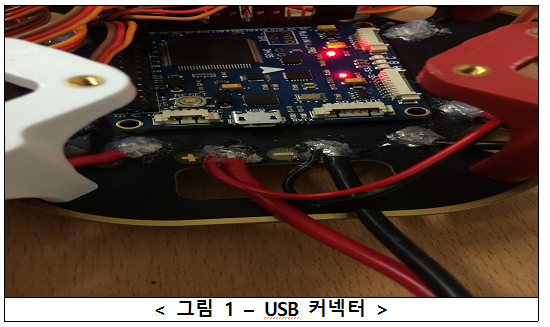
보드와 컴퓨터를 연결할 때 micro 5핀 커넥터를 통해 연결하는데 이 부분의 사용이 잦을 경우 연결 부위의 납땜이 약해져 떨어 질 수 있기 때문에 파손을 방지하기 위해 글루건으로 코팅을 해 줘야한다.
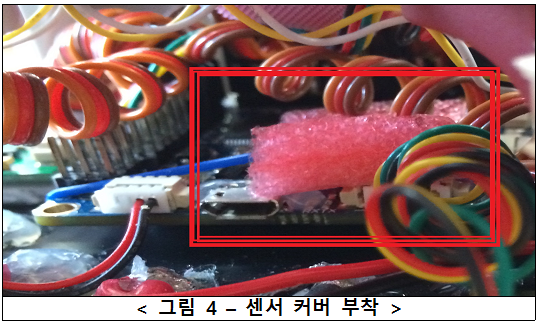
5. 센서 커버 부착
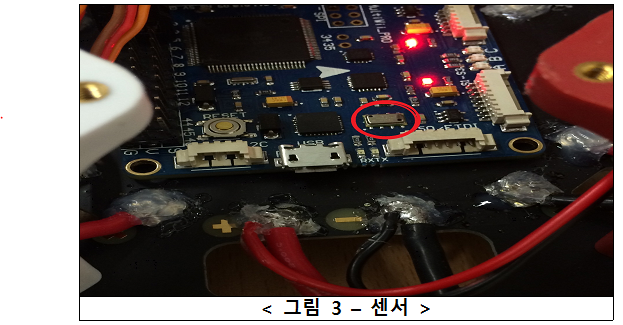
Crius보드의 센서들을 보면 지자계 센서나 기압 센서 같은 경우 센서에 작은 구멍이 두 개 있는데 이 구멍으로 프로펠러에서 나오는 바람이 들어갈 경우 오작동을 일으켜 기체 파손 및 부상의 위험성이 있다. 이를 해결하기 위해 스펀지나 휴지 같은 통기가 되는 재질의 물건을 센서 위를 막아줘야한다.
SoftWare Part
자이로센서를 초기화 하는 이유는 초기설정 값을 ‘0’으로 맞추어 주기 위함이다. 즉, ‘0’이 아닌 다른 값이 센서에 입력되어 있다면 오류가 발생할수 있기 때문.
1. 자이로센서 초기화
자이로센서
자이로센서 초기화 시작 _기체의 방향에 따른 자이로센서 설정
기체의 방향에 따른 자이로센서 설정
이때, 자이로센서가 중요한 이유는 자이로센서가 기체의 수평을 유지해주고 기체가 과도하게 흔들리지 않게 막아주기 때문.
여기서 자이로센서의 원리를 한번 알아보겠다.
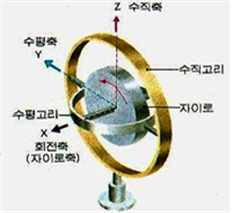
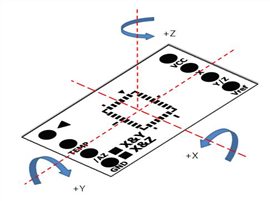
그림. 1 그림. 2
자이로센서의 원리는 위의 사진과 같이 자이로스코프를 IC화 한 것이 자이로센서이다. 즉, 위의 그림. 1의 자이로스코프의 원리를 바탕으로 하여 그림. 2의 IC칩으로 만들어 전기적 신호로써 만든 것이다.
센서 설정 및 값에 대한 파악1. 아두이노 소스
1. 초음파 센서 및 GPS 센서 설정
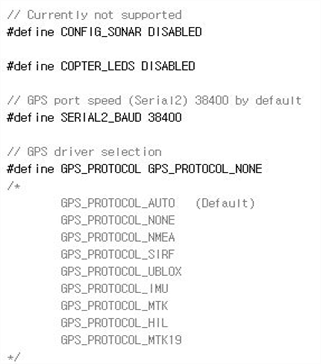 * CONFIG_SONAR DISABLED
* CONFIG_SONAR DISABLED
초음파 센서에 대한 설정을 해주는 Part이다.
이 부분에서 DISABLED 된 부분을 초음파 센서의 종류에 맞게 설정해주면 된다.
* SERIAL2_BAUD 38400
이 부분은 GPS센서에서 받아 드리는 정보를 어느 정도의 속도로 보드에 보내줄것인지 설정해주는 부분이다.
.* GPS_PROTOCOL GPS_PROTOCOL _NONE
GPS_PROTOCOL 이란 GPS 통신 규약을 말한다. 따라서 GPS 센서 종류에 맞게 설정해주면 된다.
1 _1. 초음파 센서
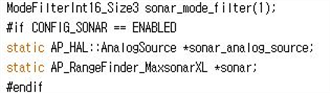 초음파 센서 종류에 대한 설정을 해주었다면
초음파 센서 종류에 대한 설정을 해주었다면
초음파 센서의 소스에서 문제가 없는지 살펴봐야 한다.
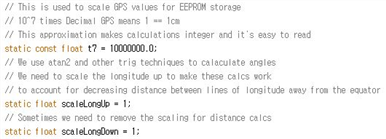 위의 초음파센서 소스와 비슷하게 GPS센서 역시 종류와 전송속도 등을 설정해준후 GPS 소스에 문제가 없는지 살펴본후 기체 정보와 부품 정보에 따라서 약간씩 수정해주어야 한다.
위의 초음파센서 소스와 비슷하게 GPS센서 역시 종류와 전송속도 등을 설정해준후 GPS 소스에 문제가 없는지 살펴본후 기체 정보와 부품 정보에 따라서 약간씩 수정해주어야 한다.
2. RC CHANNEL
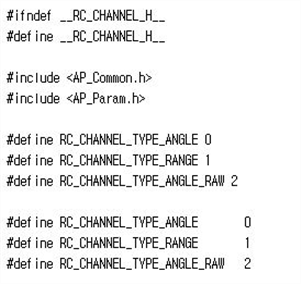
RC CHANNEL 에 대한 설정 값이다.
현재 조정을 RC = Radio control로 하기 때문에 소스파일에서 RC CHANNEL 에 대한 헤더 파일 및 설정이 필요하다.
따라서 메인 소스에 RC CHANNEL에 대한 소스를 추가해 주어야 한다.
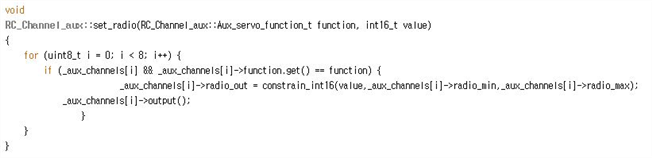 RC채널에 대한 상세 설정
RC채널에 대한 상세 설정
위의 소스는 RC 채널 즉, 서보 조종에 대한 미세한 조정 소스이다. 이위 소스 조절을 통해서 기체의 움직임에 대하여 설정할수 있다.



댓글
댓글 쓰기